Time for the first update on my senior design. The first thing I thought we should do is to do set up everything Kinect related. The software is a big part of our project, and it can be worked on anywhere as long as we had our Kinect with us. We are doing all the PC programming in Visual Studio C++, because Microsoft has a well established SDK for it, and it actually released version 1.8 just a few weeks before we began this project. To get the angles between the joints that we need, we need to first retrieve the coordinates of joints in 3D space. We used this tutorial which helped us create a simple program: http://mzubair.com/getting-started-building-your-first-kinect-app-with-c-in-visual-studio/
From this, we gathered that all the data we need is inside a data structure “myFrame” of the type “NUI_SKELETON_FRAME”. “myFrame” has a field called “skeletonData”, which is actually an array, which is because the Kinect library is capable of tracking multiple objects. That’s irrelevant though, since there is only one use currently, thus the data of interest is in “myFrame.skeletonData[0]”. For any tracked person, “skeletonData[i]” has a field “SkeletonPositions”, which is yet another array, where is entry is a 4-tuple (w, x, y, z), and that is what we need. To index appropriately, the code defines an enumerated type “NUI_SKELETON_POSITION_INDEX”, which elements such as “NUI_SKELETON_SHOULDER_LEFT”, which will index into “skeletonPositions” to get you what you want. Here is the code to print out the 3D coordinates for the right shoulder:
cout << "(";
cout << myFrame.SkeletonData[0].SkeletonPositions[NUI_SKELETON_POSITION_SHOULDER_RIGHT].x << ", ";
cout << myFrame.SkeletonData[0].SkeletonPositions[NUI_SKELETON_POSITION_SHOULDER_RIGHT].y << ", ";
cout << myFrame.SkeletonData[0].SkeletonPositions[NUI_SKELETON_POSITION_SHOULDER_RIGHT].z << ")";
//NOTE: "w" or any joint is always "1"
So how do these positions of various joints translate into angles? A rudimentary way involves using the dot product. Suppose we have a vector that
– starts at the elbow and extends to the right elbow (call this vector u)
– another vector that starts at the elbow and extends to the wrist, (call this vector v)
Then the angle “theta” between them satisfies u (dot) v = |u||v|cos(theta). We may have to do some fancy things like filtering on the data, but I think that this will be the main idea in obtaining the angles.
To close, here’s part of the hand that we plan to make the robot’s end affector:
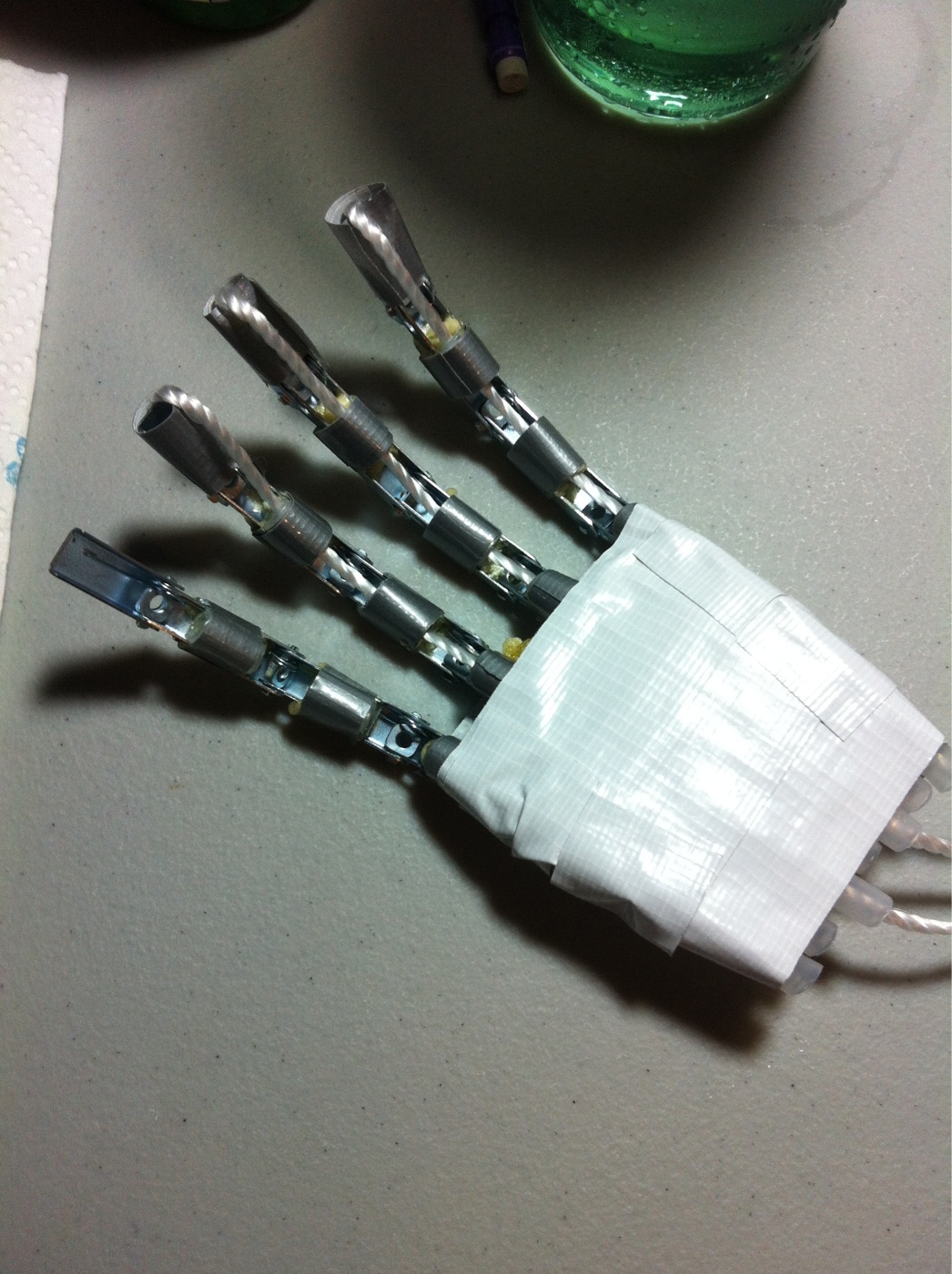 The picture cuts it off, but here’s how it works: it’s rough anatomically correct, with all the joints where they’re supposed to be. As shown is the “default” state for the hand. There’s a string that’s fixed to the end of a finger, and it is fed through the inner of the finger (the “bones” are hollow rubber tubes). The hand part is also constructed of a series of hollow tubes encased in foam, so that there is a path from the fingertip to the bottom of the hand, where the other end of the string comes out. When the string is pulled, the finger bends, and when the string is released, the finger returns to the default state. The idea is to tie the end that comes out of the bottom of the hand to a motor, and correspond servo motor pulses to the degree of finger bend. Here’s a video describing what I mean:
The picture cuts it off, but here’s how it works: it’s rough anatomically correct, with all the joints where they’re supposed to be. As shown is the “default” state for the hand. There’s a string that’s fixed to the end of a finger, and it is fed through the inner of the finger (the “bones” are hollow rubber tubes). The hand part is also constructed of a series of hollow tubes encased in foam, so that there is a path from the fingertip to the bottom of the hand, where the other end of the string comes out. When the string is pulled, the finger bends, and when the string is released, the finger returns to the default state. The idea is to tie the end that comes out of the bottom of the hand to a motor, and correspond servo motor pulses to the degree of finger bend. Here’s a video describing what I mean:
(Cameron Reid featured in the video)
Well, I think that’s enough for one update. Look out for the next one where I will hopefully have the shoulder working.
