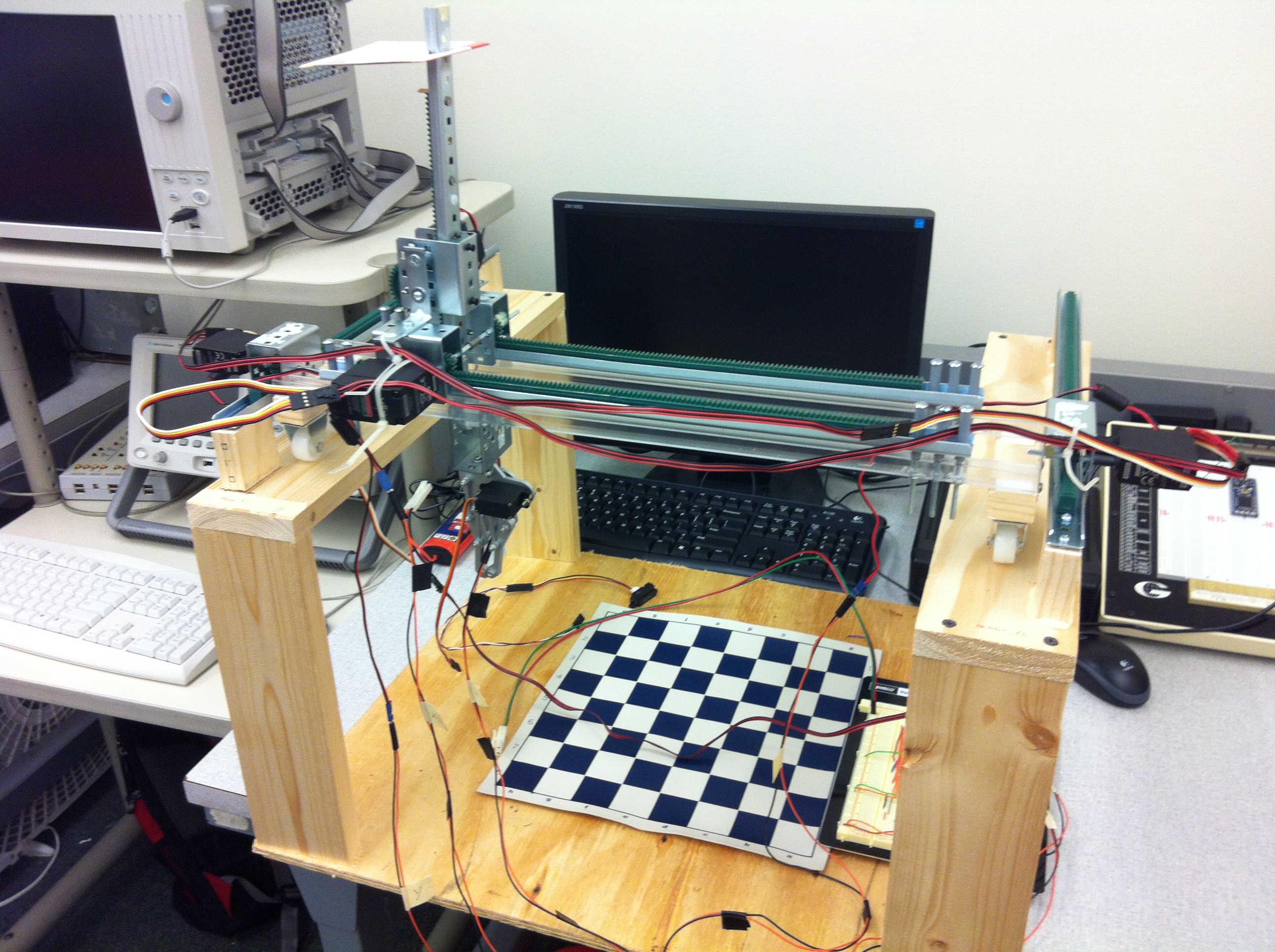
Since last time, my rig got an upgrade in placement of the y-axis movement racks and z-axis movement racks. It looks pretty sweet, I know. It’s still got some ugly wires, but believe me, it was looking much worse earlier. May have to get some tubing for the remaining wires.

Here’s the rig controller. 4 identical H-bridges control each of the motors. I will probably adjust it so all the wires stay flush against the breadboard.

Lastly, here’s the Sparkfun claw affixed to the end of the z-axis. It is the only thing that’s not part of the system, as evident by its leads unconnected. I’m heading back to the lab to fix that as soon as I finish eating. You will also see in the back the distance sensor we plan to use to determine the height of the z-axis. You might wonder why don’t we just use the encoder? Because I had an oversight, and didn’t get enough encoder attachments for the motors.
A simple test revealed that everything moved without fail, which is a huge relief. It means that this rig is ready for a day of programming. Look out for the next update!
